| GISdevelopment.net ---> AARS ---> ACRS 1997 ---> Poster Session 3 |
Evaluation of Handy GPSs and
Their Applications
Shiro Ochi
Institute of Industrial Science, University of Tokyo
7-22 Roppongi, Minatoku Tokyo, Japan, 106
Tel: +81-3-3402-6231(2562) FAX :+81-3-3479-2762
E-mail : ochi@shunji.iis.u-tokyo.ac.jp
Institute of Industrial Science, University of Tokyo
7-22 Roppongi, Minatoku Tokyo, Japan, 106
Tel: +81-3-3402-6231(2562) FAX :+81-3-3479-2762
E-mail : ochi@shunji.iis.u-tokyo.ac.jp
Abstract
Due to the expansion of GPS users, various types of GPS have appeared in the market. Accuracy is very much required for precise surveying, where cost performance is more important for many purposes such as car navigation system, field check investigation. The accuracy of hand GPS marketed for hobby use, named "Germin GPS-38" was examined in this paper. The error ranges of X(longitude). Y (latitude) and Z(altitude) direction are respectively -38 to +52 m, -130 m to +74 m. and -289 m to +71 m by single GPS. In order to improve the accuracy, pseudo differential method is effective, where the error ranges of X, Y and Z direction are -40 m to +49 m, -31m to + 33m, and -66m to +46m respectively. By averaging 10m minutes data at the same point with pseudo-differential method, 14m distance error in X-Y plain is acquired, and it is practical for ground truth investigation with Remote Sensing data.
1. Introduction
The number of GPS users is increasing rapidly in the field of not only surveying but also various purposes such as car navigation system. Because the cost of small systems of handy GPS is a few hundred. US$, and they can available anywhere in the world, handy GPSs are useful for field checking for Remote Sensing data. However the errors of these GPSs are reported as about 100m(Tsuchiyaand Tshuji 1995), it will be taken care to discuss the accuracy in pixel resolution for R. S. data which is resolution is few decade of meters. In this paper, "Germin GPS-38" that is popular for hobby purposes was used for the error verification, and the methods to improve the accuracy are proposed. The characteristics of the GPS are small and light to carry, and the data can be transferred to PC through RS232C interface. The position information displayed on the machine monitor changes every two seconds, and it makes difficult to define the position. So the data acquiring and correction were made by series of received data for about 50 minutes.
2. Error by Single GPS
By receiving GPS data at a point where the extract position is known, the errors in X(longitude), Y(latitude) and Z(altitude) were checked. Fig.-1 shows the fluctuation of the received data for 50 minutes at the same point, where the X axis is time and Y axis is error in meters. The data fluctuates, but has not specific cycle. The error of Y(latitude) direction which is from -130 m to +74m (204 m ranges) is more than the error of X (longitude) direction which is from -38m to +52m (90m range). Fig-2 shows the error fluctuation of the received altitude by the GPS. The maximum error appeared after ten minutes from starting the observation, however the error became stable, that is -50m to +50m range, after 15 minutes from the starting the observation. It is said that the accuracy of altitude is very much influenced by the number of captured GPS satellite (Tomita and Matsuyama 1996), however this was not considered in this paper.
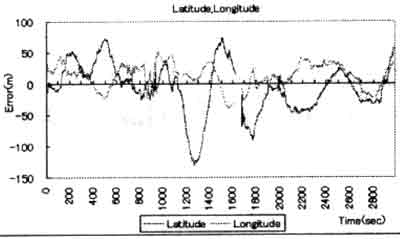
Fig 1 Error fluctuation for X(longitude) and Y(latitude)
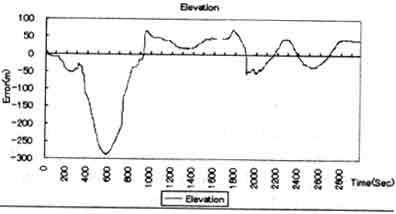
Fig-2 Error fluctuation for Z(altitude)
The result by analyzing the raw received GPS data means that the position information which can be obtained at a point and a time is sometime true accidentally, but it will be wrong in most cases. The error is more than 100m in X-Y distance and 250 m in Z direction in some cases. So the method to improve the accuracy was suggested by averaging 5 minutes data, 10 minutes data and 30 minutes data. Fig-3 show the averaged error for 5 minutes, 10 minutes and 30 minutes in X-Y direction(horizontal distance). The averaged 5 minutes error is 13m to 69m (56 m range), the averaged 10 minutes error is 11m to 34m (23m range) and the 30 minutes error is 12 m to 25m (13 m range). This means that by observing long period such as 30 minutes makes the accuracy improved.
Fig-3 Averaged error of horizontal distance
3. Error by Differential GPS
More accurate positioning is possible by handy GPS using differential method (Tomita and Matsuyama 1996, Tsuyuki 1994). The "Germin GPS-38" has function to receive the Differential GPS (DGPS) data, however it requires spatial services by a GPS company which provide DGPS information by telephone communication and this is not adequate for using field investigation in abroad. In this paper, pseudo-differential method was tried. The method is (1) to receive GPS data at two point simultaneously, one is already known in position and another is unknown point, (2) to calculate the error of received GPS data at known point and (3) to subtract the calculated error from the GPS data of unknown point at the corresponding time. Fig-4, 5 and 6 show the received latitude, longitude and altitude by GPS at two different points where A is known and B is unknown. From the figure, the fluctuation seems synchronized for two points. By calculating error of point-B using pseudo-DGPS method, error evaluation was made.
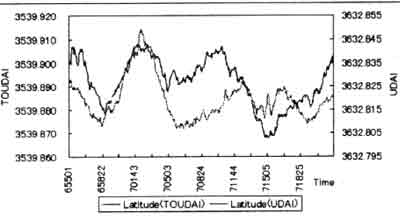
Fig-4 psedo-differential dat (latitude)
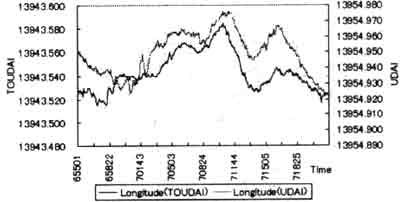
Fig-5 pseudo-differential data(logitude)
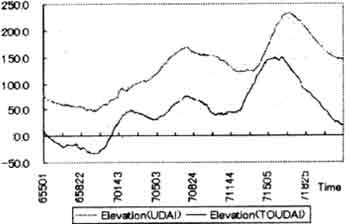
Fig-6 pseudo-differential data(altitude)
There still remain error by pseudo DGPS, however the accuracy was very much improved than single GPS method. The 5 minutes averaged error of horizontal distance of pseudo DGPS is 1m to 33m, and it is more stable than single GPS error which is 13m to 69m. The 10 minutes averaged horizontal distance error of pseudo DGPS is 2m to 14m. Table-1 shows the result of error evaluation for various-types of data correction.
| Latitude | Longitude | Horizontal Dist. | Altitude | ||
| Single GPS | Raw Data | -130m/74m | -38m/52m | 0m/132m | -289m/71m |
| 5min Ave. | -67m/39m | -16m/31m | 13m/69m | -235m/51m | |
| 10min Ave. | -33m/28m. | -6m/25m | 11m/34m | -159m/34m | |
| 30min Ave. | -20m/-2m | 9m/15m | 12m/25m | -4m/15m | |
| Pseudo-DGPS | Raw Data | -40m/49m | -31m/33m | 0.5m/52m | -66m/46m |
| 5min Ave. | -25m/27m | -14m/18m | 1m/33m | -28m/34m | |
| 10min Ave. | -10m/11 m | -10m/8m | 2m/14m | -11m/-2m |
4. Required Accuracy for R.S. Data
The error of handy type GPS is a few decades meters to hundred meters by single-type GPS and several meters to a few decades meter by pseudo DGPS. How much accuracy is required for field investigation for R. S. data. Position information is discussed in two ways in this paper. Case-(a) is that a point is used as a ground control point (GCP) and Case-(b) is that a point used as ground truth (GT) data.
- Point as GCP
A pixel in R. S. data is shown as gray color in Fig. 7. Now the GPS receiver is standing in the pixel, but the exact point the pixel, but the exact point in the pixel is not clear, and it may be at point-B in the worst case. When the GPS positioning error is d(m) in horizontal distance, the GPS indicated point -P in Fig. 7. And the maximum error of GCP positioning, that is the distance between-A, which is the exact center of the pixel, and point-P, is 2 n + d(m), where n is the pixel size. If the GCP accuracy requires less than 1 pixel error, the "d" must be less than 0.3 n (m) which is about 9(m) in case of the data is LANDSAT-TM data where the pixel size(n) is 30 m.

Fig-7 Error for gcp
- Point as GT
Remarked pixel is colored gray in Fig-8. The GPS receiver is standing in the pixel, but the exact point in the pixel is not clear. When the positioning error is adopted within 1 pixel, the required GPS accuracy is also within 1 pixel which as shown as dotted line in Fig-8. When LANDSAT-TM data is used, the required GPS error is less than 30m.
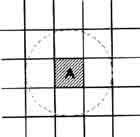
Fig-7 Error for GT
5.Discussion
When the "Germin GPS-38" which was used in this paper is used for field survey with LANDSAT-TM data, the acquired point data by calculating 10 minutes average in pseudo-DGPS method is not enough as GCP data because the error includes sometimes 14 m which is more than the GCP's required error which is about 9m for TM data . On the other hand, when the position data is used at GT data, 30 minutes averaged data by single GPS or 5 minutes averaged data by pseudo-GPS are acceptable.
Geodetic systems and projections were not considered in this paper. The "Germin GPS-38" supports various geodetic systems rather than WGS-84. Attentions must be paid for field survey in abroad with GPS and local maps.
References
- Tomita, K and Matsuyama, H, 1996. Development and Investigations of
Semi-Differential GPS,
- Theory and Application of GIS, Vol 4. No 2, GIS Association of
Japan, pp. 15-27
- Tsuchiya, J and Tsuji, H, 1995. GPS Sokuryo-no Kiso, pp11-170
- Tsuyuki, S, 1994. Sinrin Tyosa ni Okeru GPS riyono Kanosuei, Journal
of Japan Forest Planning, pp.
45-58.