| GISdevelopment.net ---> AARS ---> ACRS 1998 ---> Mapping From Space |
Accuracy Assessment an
Improvement for Level Survey Survey using Real Time Kinematic (RTK)
GPS
Dinesh
Manandhar1, kiyoshi Honda1, Shunji
Murai1,Sachio Kubo2, Masahiro
Yonemura2
1space Technology Application and Research
Asian Institute of Technology
P.O. Box 4, Klong Luang, Pathumathani 12120, Thailand
E-mail : Dinesh_nep@hotmail.com, honda@ait.ac.th
2Keio University, Japan
Abstract1space Technology Application and Research
Asian Institute of Technology
P.O. Box 4, Klong Luang, Pathumathani 12120, Thailand
E-mail : Dinesh_nep@hotmail.com, honda@ait.ac.th
2Keio University, Japan
The global Positioning System (GPS) is a satellite based positioning and navigation system that provides precise position, velocity and time information. The height accuracy is GPS is lower than the planimetric accuracy. The paper discusses about the height accuracy achievable in real time kinematics mode using single frequency GPS wit Ovatel's RT20 algorithm. Analysis was also done to see whether there is any correlation between the antenna velocity (speed ) and the accuracy. As a core part of the reach, a procedural was developed to improve the height accuracy based on the observed data in RTK mode. This was accomplished by using two calibration points as reference and distributing the errors among the observed points. This improved the accuracy to a few centimeters level (2-4cm, RMS), which is a very significant improvement.
Introduction
The successful application of GPS is dependent on understanding its coordinate system, achievable accuracy and limitations. All GPS modes of operation are to the same. Accuracy ranging from hundred meters to a few millimeters cab be achieved depending upon the data collection and processing techniques, hardware, software, satellite geometry and atmospheric condition.
In order to optimize the survey time, it is necessary to know there accuracy achievable in different modes of operation. It is also necessary to know the procedures in order to achieve higher accuracy. A GPS cab be used for level survey provided that the accuracy achievable is good enough for the desired application. In their research a procedural was developed to achieve centimeter level accuracy in height component, which could be useful for level suvey.
Objective
The main objective of this research is to improve the height accuracy observed in real time kinematics (RTK) mode.
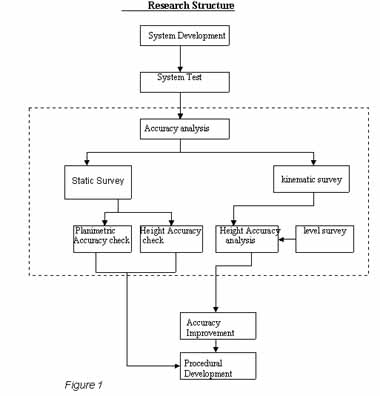
Research Structure
The structure of this research is shown in figure 1. the structure mainly consists of four components. The first one is to develop the system itself, sine this is the first time a base station was installed in Thailand ( and hence at AIT) using mobile phone for real time differential correction. The next component includes the accuracy analysis in both the static and kinematic modes. In static mode, the accuracy was analyzed for plan metric and height accuracy was analysed. The height accuracy achieved in kinematic mode was compared with the level survey. An overhead road crossing at a base length of three kilometer was chosen for real time kinematic survey. The road is about 750 meters long, elevated up to eight meters ( approximately) at the center of the road and has 31 piers. The error at each pier location was calculated and analysed to see whether there was any effect of antenna velocity ( vehicle speed) on accuracy. Next , the analysis was done to see whether the errors could be minimized. The RMS error, the standard deviation of the error itself and the scatter plot between the errors at the calibration points were analysed. Based on these analysis and the two calibration points an error correction technique was applied to distribute the errors among the observed points
Results
The Result obtained room the accuracy analysis in static and kinematic mode are discussed below. Figure 2 shows the minimum observation time to achieve 20 cm precision as a function of base length in static mode with RT20. RT20 is the proprietary algorithm developed by Novatel for phase observation using single frequency GPS in real time.
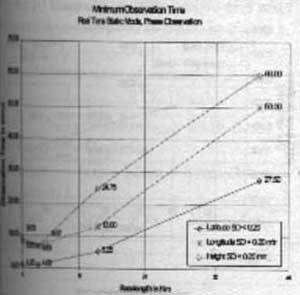 Figure 2 |
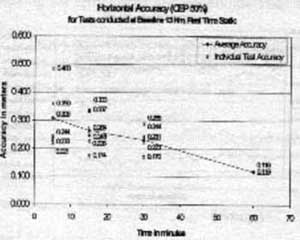 Figure 3 |
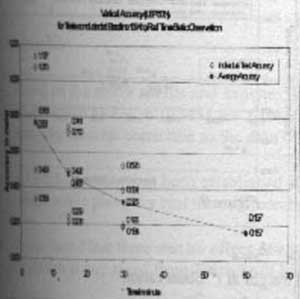 Figure 4 |
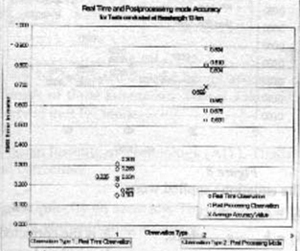 Figure 5 |
Figure 3 and 4 shows the horizontal and vertical accuracy that can be achieved at a base length of 13 km as a function of observation time period. An accuracy of 20 cm be achieved after 30 minutes observation for the horizontal component. It takes more than 45 minutes for the vertical component to give the same level of accuracy. The height accuracy is less than the horizontal accuracy.
Figure 5 shows the comparison of accuracy that can be achieved with real time (with RT20, carrier phase observation ) and post processing ( with out RT20, only code phase ) . the accuracy achieved in carrier phase with RT 20 is better than the accuracy achieved by code phase.
Figure 6 shows the results of the kinematic survey for height accuracy assessment. The height value observed in RTK mode was compared with the level survey. The RMS error varied from 8 cm to 30 cm for different tests. The error thus achieved in figure 6 was analysed fro further improvement. Figure 7 shows that there is no relation between the antenna velocity (vehicle speed ) and he accuracy. It could be possible to improve the accuracy, as the RMS error is more than the standard deviation of the errors ( comparing figures 7 and 8 ). Figure 9 shows that the errors in figure 6 are linear, they are not changing randomly. Thus a liner equation was applied to improve the accuracy by taking two calibration points at pier no 1 and 31.
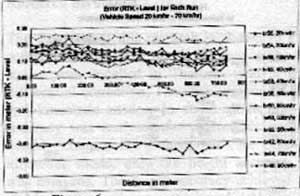 Figure 6 |
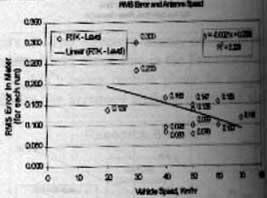 Figure 7 |
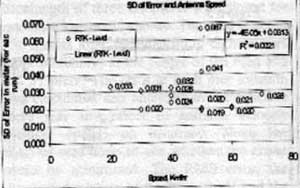 Figure 8 |
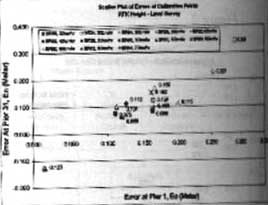 Figure 9 |
The equations applied were:
e0 = hrtk,0 -htrue,0
en = hrtk,n - htrue,n
hi = hobs - ei
where
hi is the corrected height at ith observation
hobs is the observed height
ei is the error tern ( error correction to be applied)

eo is the error between the RTK Height and the True value at calibration Point 1
en is the error between the RTK Height and the True Value at calibration Point 2
di is the distance from the calibration point 1, to the point where the error is toe be applied
dn is the total distance between the two calibration points, Pier 1 and pier 31.
Figure 10 shows the results before and after applying the error correction equations. The accuracy thus improved is listed in table 1.
| RTK Height | ||
| Standard Deviation | RMS Error | |
| Before Correction | 7cm~12cm | 8cm~30cm |
| After Correction | 1cm~3cm | 2cm~4cm |
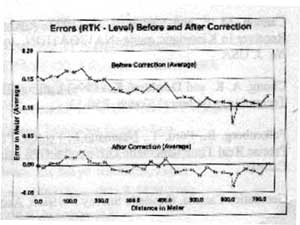
Figure 10
Conclusions
Based on the above results and analysis, it can be concluded that the height accuracy can b e improved to 2-4 cm (RMS) for a base length of three kilometers. This sis achieved by applying the error correction to the data observed in RTK mode.
A GPS base station has been established as Asian Institute of Technology (AIT), Thailand, using mobile phone for real time differential correction .
It was found that was no effect of antenna velocity on accuracy. Thus the vehicle can be driven at any speed from 10km/hr without losing accuracy.
Minimum observation time required to achieve 20 cm precision as a function of base length as identified.
Recommendations
The applicability of this methodology has to be tested for different applications like mobile mapping, hydrological modeling and road affect area assessment etc.
There are still potholes where this methodology could be improved. The methodology has to be tested for different road conditions in urban environment, different topography of the road and longer calibration distance. Those could be further areas of research.
 Figure 11. Survey Vehicle with Antenna on top. |
 Figure 12. The Overhead Crossing chose for Survey |
References
- Cannon, M.E. and Lanhapell, G. (1992) Analysis of a high performance C/A code GPS Receiver in Kinematic mode , NAVIGATION, journal of the insitiute of Navigation vol .39 No. 3, USA
- Chong , A.K. and Dewhirst , K. (1996) Calling GPS; Long -Range Positioning via Cellular Technology Sketch Technical Sketch .P50-53 .
- Falkenberg, B., Ford, T., Neumann, J., Fenton, P., Cannon, M.E. and Lachapell, G. (1992) Precise Real Time Differential GPS using a cellular Radio Modem IEEE, PLANS Canada.
- Geomantics Canada , Geodetic Survey Division , Accuracy Standards for Positioning .
- Leick , A., (1995) GPS Satellite Surveying , second Edition, A Wiley-International Publication, 1995.
- Seeber, G., 1993 , Satellite Geodesy, Foundations, Methods and Applications, Berlin, Walter de Gruyter.
- Wu, J. and Lin, S.G., (1995) Height Accuracy of one and Half Centimeters by GPS Rapid Static Surveying , Int. J Remote, vol. 16, No. 15, 2863-2874.