| GISdevelopment.net ---> AARS ---> ACRS 1998 ---> Poster Session 2 |
Urban Vegetation Cover
Mapping with Vegetation Cover
Naoki Shirai*, Masahiro
Setojima*, Akira Hoyano**, Donkyu Yun**
(*Kokusai Kogyo co., Ltd., **Tokyo Institute of Technology)
2 Rokuban-cho, Chiyoda-Ku, Tokyo, 102-0085, Japan
Tel: (81)-3-3288-5812 Fax:(81) -3-3262-6250
E-mail: nshirai@kkc.co.jp
Abstract (*Kokusai Kogyo co., Ltd., **Tokyo Institute of Technology)
2 Rokuban-cho, Chiyoda-Ku, Tokyo, 102-0085, Japan
Tel: (81)-3-3288-5812 Fax:(81) -3-3262-6250
E-mail: nshirai@kkc.co.jp
Since most vegetation in urban area is small scale one, VCRP ( vegetation cove ratio is in a pixel) is known as a suitable method for vegetation cover mapping in urban area. Putting to practical use of the vegetation cover mapping, tow practical method have been proposed , which are quantification of VCRP and sub- classification vegetation to tree, grass and lawn. The method was applied to Kanazawa area. Comparing the results of field survey, it was confirmed the adaptability of the method.
Introduction
In recent years , a realization of an environmental friendly urban is raised as an important subject in Asian countries . especially, an urban revegetation is attracted attention on the point of vegetation environmental alleviating effect. It is essential work for revegetation in urban are required, considering the thermal environment in urban and the living environment in ecosystem. Since the effect of the subcategories is different on the aspect of environment adjustment, it is also required to classify the vegetation into subdivided subcategories of tree, grass and lawn.
Proposal for putting to practical use of the vegetation cover mapping with VCRP using he multispectral data is aim of this study. Concrete themes are to propose a practical method for VCRP quantification and sub classification vegetation to tree, grass and lawn.
Quantification of VCRP
Most of urban vegetation is small scale one such as roadside tree, garden trees, and so on. It should not be ignored on the point of the environment adjustment effect. In this respect, the spatial resolution of satellite remote sensing data ( including commercial satellite in near future ) should be not profitable for pixel wise analysis on the urban vegetation. Authors have been developing the vegetation mapping with VCRP.MRVI (Modified Ratio Vegetation Index ) is an index for extracting VCRP[1].
| MRVI+NIR/(R+G+B+NIR) | (1) |
Since MRVI is approximately linear to VCRP, which can be estimated mean MRVI values of pure vegetation and non-vegetation , respectively . therefore, obtaining method for mean MRVI values of pure vegetation and pure none-vegetation has been proposed using arbitrary multispectral data. Figure 1 explains the method for extracting the mean MRVI values of vegetation and non-vegetation. Part A and B indicate the MRVI frequency of pure vegetation and pure non-vegetation, respectively. Mean MRVI values can be derived from the calibration of part A and B.
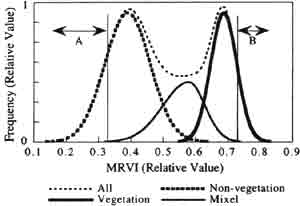
Fig.1 Schemestic histograms of vegetation, non-vegetation and all pixel.
Figure 2 shows an example adapted the calibration method to Kawasaki area. The reference data for comparison had been used vegetation cover map constructed by the field survey. The border line between vegetation and non-vegetation regard as mixed of vegetation and non-vegetation . the difference between mean MRVI obtained by above method and that obtained by field survey was 0.01 (vegetation ) and 0.02 (non-vegetation ) respectively, which correspond within VCRP5 percent. From the results, it has been found that the method is adequatabel for VCRP estimation method.
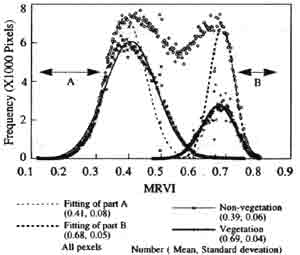
Fig.2 MRVI histogram in kawasaki area (Airborne/MSS ,1.9m) and separating the histograms of vegetation and non-vegetation from all MRVI histogram
Subclassification of vegetation areas
In this chapter , we propose the Subclassification of vegetation using VCRP image and multispectral image. Since it can be thought that the pixels with high VCRP have predominant information of subcategories , the pixel with high VCRP has been object for Subclassification. In tins case, it is necessary to clarify the threshold of VCRP form the spectral information, which can be sub classified into tree, grass and lawn. It should be elucidate the threshold as follow.
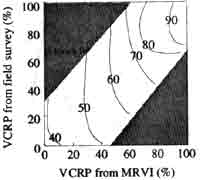 (a) In case of three categories(Tree, Grass, Lawn) |
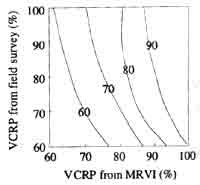 (b) In case of four categories (Tree, Grass, Lawn, Unclassified) |
| Fig3. The rate of classification accuracy in Kawasaki area. | |
Most likelihood methods are adopted n Subclassification. Supervisor had been set as tree, grass an lawn in vegetation map constructed by field survey. Figure 3(a) shows the classification accuracy of classification results on three categories. Accuracy was defined as concordance between Subclassification results and supervisor. It cab be found that the pixel with 60 percent or higher VCRP can be adequatable of Subclassification, on the point of 70 percent or higher classification accuracy. Figure 3(b) shows that of the case added category unclassified . the figure indicates that all pixel with 60 percent or les VCRP was unclassified . it can be also found that the pixel with 60 percent or less VCRP can be adequatable. From above two results , we can conclude that it should be proper to classify the pixels with VCRP 60 percent or higher into tree, grass and lawn.
Application to Kanazawa area
In order to investigate the practicability of the method, the method has been adapted to airborne MSS data ( spatial resolution :2 , observed on September 25, 1997) in Kanazawa. Figure 4 shows the classification results of Kanazawa area. E confirmed the propriety of this vegetation cover map comparing the field survey results carried out simultaneously. In this vegetation cover map, the roadside trees and garden trees located in the radius of a few meters as well as the lawn is identified as a result of classification . the small scale vegetations. Which cannot be classified pixels wise are expressed as the VCRP.
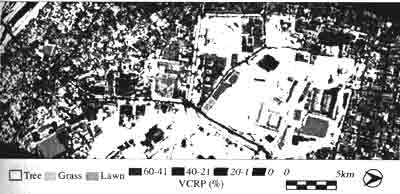
Fig.4 An example of vegetation cover map in kanazawa
Summary
Author have been developing the vegetation mapping with VCRP. Following items for putting to practical use of vegetation with VCRP were discussed. Practical use of the vegetation cover mapping using the multispectral data, it was clarified the method to quantity VCRP from arbitrary multispectral data the threshold of VCRPL suitable of the Subclassification into tree, grass and lawn. It was also showed that an example adapted the method to airborne MSS data in Kanazawa, Japan.
Acknowledgment
The airborne MSS data of Kanazawas is provided by "Pilot Project of Land Environment" a project in National Land Agency, Japan.
Reference:
- Donkyu YUN and Akira HOYANO : Index to extract VCRP in urban areas, jour . of the Remote. Sensing Society of Japan, Vol 18 No.3, 1998.
- Donkyu YUN, Akira Hoyano, Naoki, Shirai and Masahiro Setojima: A study on putting to practical use of urban vegetation mapping with VCRP, Part 1 and Part 2, Proc. Of the 25 the Japanese Conference on Remote Sensing, Nov. 1998, Koyoto, Japan.(Japanese).