| GISdevelopment.net ---> AARS ---> ACRS 2004 ---> New Generation Sensors and Applications: Line Scanner |
PARAMETERS ACQUISITION FOR 3D
TREE MODELING USING THREE-LINE SENSOR
Hiroki MATSUDA, Masafumi
NAKAGAWA, Ryosuke SHIBASAKI
Graduate School of Engineering, Department of Civil Engineering and Center for Spatial Information Science
The University of Tokyo
Cw-503, Block C, 4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
(81)-3-5452-6417
(81)-3-5452-6414
Email: hmatsuda@iis.u-tokyo.ac.jp
Graduate School of Engineering, Department of Civil Engineering and Center for Spatial Information Science
The University of Tokyo
Cw-503, Block C, 4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
(81)-3-5452-6417
(81)-3-5452-6414
Email: hmatsuda@iis.u-tokyo.ac.jp
ABSTRACT:
In Virtual Reality (VR), the development of various three-dimensional (3D) modelers enables beautiful and faithful representation of urban landscape including buildings, streets and the other urban facilities. Although model producers pay so much attention to the faithful representation of man-made objects such as buildings, they usually determine tree model parameters such as tree type, age, season without examining actual situations of the trees. Therefore, they are not very realistic though they may look beautiful.
This paper aims to develop measures for producing a tree model more faithful to the actual situations using high-resolution sensor data (e.g. Three Line Scanner (TLS) data, Vehicle-borne Laser Mapping Scanner (VLMS) data. The procedure of the model production consists of the following five phases: (1) tree extraction from sensor data, (2) tree’s volume estimation (height, dimension, and diameter of trunk), (3) parameter determination, (4) initial model creation, and (5) pruning.
(1) Some tree extraction methods have been already developed; therefore, we used these methods. (2) Tree’s volume is estimated from TLS and VLMS data using a model-fitting algorithm. (3) Tree’s type has to be provided manually, though, age is estimated by the diameter of trunk. We’ve also automated this procedure. (4) Based on these parameters, an initial model is produced using commercial 3D tree modeler. (5) Especially in urban area, trees are usually pruned; therefore, the initial model may greatly differ from the reality. In order to remove this difference, we’ve formulated a pruning procedure along with several rules to automate this procedure. Finally, the reproduced tree models are quantitatively evaluated in terms of the similarity against the real trees using their range images.
Methodology:
First of all, the whole procedure from data acquisition to model creation is shown in Figure 1.
Figure 1. Procedures from data acquisition to model creation
As you can see, the whole procedure mainly consists of three major parts and five phases; (a) data acquisition, (b) parameter acquisition (b-1. trees trunk estimation, b-2. parameter determination) and (c) modeler operation (c-1. primitive model creation, c-2. pruning).
In part 1., we've conducted an experiment using TLS and VLMS, and we've got scan data.
In part 2., we've converted acquainted data into image data, position data, etc., and then, we've estimated and determined the parameters from the converted data to create 3D model using modeler.
In part 3., we've created primitive 3D model from the parameters, firstly. And next, we've pruned the model using commercial 3D modeler.
The details of each prodedures are as follows.
a. Data acquisition:
a-1. Sensor system
a-1-1. Three Line Sensor (TLS)
Three Line Sensor (TLS) are implemented in the sensor system. Each has an 8mm F4 fish-eye lens with a vision field of 180 ° on it. In each snapshot, a single-row image (line image) of 1 × 2048 pixels, is captured on the scanning plane. Line images are captured at a rate of 80 Hz by each line camera.
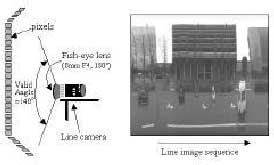
Figure 2. Line images and an example of a line-image strip
Figure 2 shows a strip of line image, where each column corresponds to the valid pixels of a line image.
a-1-2. Vehicle-borne Laser Mapping Scanner (VLMS)
Vehicle-borne Laser Mapping Scanner (VLMS) are used in the sensor system. In one scanning ( a range scan line), the VLMS profiles 600 range points of the surroundings on the scanning plane within 300 ° .
A blind area of 60 ° exists, due to the hard ware configuration. The VLMS has a maximum range distance of 100m and an average error of 3 cm. The frequency of the VLMS is 20Hz, implying that it profiles 20 range scan lines per second. Figure 3 shows a piece of range image, where each column corresponds to a range scan line, and range scan lines are aligned in the order of the measurement sequence.
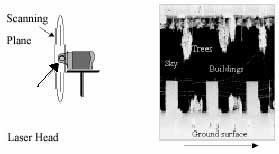
Figure 3. Laser range finder and Example of range data
2-2. Experiment
An experiment was conducted on May 29, 2004, in a real urban outdoor environment, Kinshicho, located on eastern part of Tokyo. The site is well urbanized, and lots of buildings, trees, as well as other urban facilities are aligned along with roads.
The measurement vehicle ran a few courses in the site. A map of the testing site and vehicle trajectory is shown in Fig. 4. Over 6,000 line images and 6,000 range scan lines were measured by each TLS and VLMS, respectively, as the vehicle moved forward.
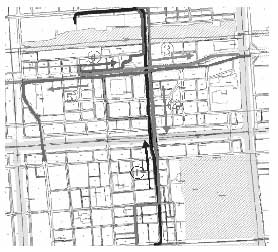
Figure 4. Vehicle trajectory
b. Parameter acquisition:
b-1. Tree extraction:
In VLMS data, the X-, Y-, Z-coordinate, and roll-, pitch-, yaw-angle of the vehicle, and the distance from the VLMS to the point are recorded; thus, the coordinate of each point measured by VLMS are calculated using Formula 1.

where d is the distance from the VLMS to the point, a is the angle of laser, and T is the conversion matrix.
Next, the points, which seem to be irrelevant to trees, are removed. At last, the clustered points are defined as 'tree'.
b-2. Parameter determination:
To create primitive model, three parameters; tree's age, tree's type, and season, are needed to be determined. Each parameter is determined by following procedures.
b-2-1. Age
Tree's age is estimated using regression model. We've adopted the regression model developed by Fujiwara and Yamagishi (*1). The formula of the model is shown below.

where Y is the age of tree and X is diameter of tree's trunk.
At first, diameter of tree’s trunk is estimated by the coordinate of each tree's points. The coordinate of each point has been already obtained; thus, the diameter of tree's trunk is easily calculated.
Next the estimated tree's trunk diameter is input into the regression model. The result of calculation is shown below.
b-2-2. Season:
As seasonal parameter, Spring, Summer, Autumn and Winter can be used. The tasting date was May 29;thus, the season are determined 'Spring'.
b-2-3. Type:
Tree's type is determined manually by examining CCD image.
c. Modeler operation
c-1. Primitive model creation:
Primitive model is created using commercial 3D modeler. The modeler needs three parameters (age, type, season) to create models. The parameters determined above procedures are input. The image of the primitive model is shown Fig. 5.

Figure 5. The image of the primitive mode
c-2. Pruning:
The created model is exactly beautiful but not the very practical. The reason of this is that trees in real world are 'pruned' to look more beautiful. Therefore, the primitive model are also pruned along with rule. Pruning procedure has been manual and along with some general actual rules.
The image of the pruned model and the line image are compared in Fig. 6.

Figure 6. The image of the pruned model and the line
Conclusion:
Compared with real image, the created 3D tree model is obviously very similar to real tree.
3D tree models proved to be able to be created automatically from TLS and VLMS data using some algorithms.
In this research, determination of tree's type and pruning process were conducted manually; thus, we have to develop automatic algorithms in these procedures.
Reference:
- N. Fujiwara, H. Yamagishi, ‘Evaluation of CO2 Input and Output Fluctuation in Human-affected Urban Green Space’, published in Japanese.
- H. Zhao, R. Shibasaki, 2003, Special Issue on Computer Vision System: Reconstructing Textured CAD Model of Urban Environment using Vehicle-borne Laser Range Scanners and Line Cameras, Machine Vision and Applications, 14 (2003) 1,pp. 35-41.
- Nakagawa, M., Shibasaki, R., Comparative study of data selection in data integration for 3-D building reconstruction. The 24th Asian Conference on Remote Sensing Busan, Korea. Nakagawa, M., Shibasaki, R., Integrating high resolution air-borne linear CCD (TLS) imagery and LIDAR data., URBAN2003.