| GISdevelopment.net ---> AARS ---> ACRS 2004 ---> Data Processing: Automatic Feature Extraction |
Automated Road Extraction and
Updating Using the Atomi System - Performance Comparison Between Aerial
Film, ADS40, IKONOS and Quickbird Orthoimagery
Chunsun Zhang a
, Emmanual Baltsavias b
a Department of Geomatics, The University of Melbourne,
VIC 3010, Australia –
E-mail: chunsun@unilb.edu.au
b Institute of Geodesy and Photogrammetry,
Swiss Federal Institute of Technology (ETH)
Zurich, ETH-Hoenggerberg, CH-8093 Zurich, Switzerland
E-mail: manos@geod.baug.ethz.ch
a Department of Geomatics, The University of Melbourne,
VIC 3010, Australia –
E-mail: chunsun@unilb.edu.au
b Institute of Geodesy and Photogrammetry,
Swiss Federal Institute of Technology (ETH)
Zurich, ETH-Hoenggerberg, CH-8093 Zurich, Switzerland
E-mail: manos@geod.baug.ethz.ch
ABSTRACT
Automated road extraction from digital images has drawn considerable attention due to the need for the efficient acquisition and updating of road data for geodatabases. The development of new digital aerial sensors and high-resolution satellite sensors signifies a revolutionary change in image acquisition and the possibility of fully digital processing from image acquisition to the generation of value-added products for various applications. At ETH Zurich, we have developed an operational system for the automated extraction of 3D road networks from imagery that integrates the processing of colour image data and existing digital spatial databases. The system has been extensively tested on areas with diverse terrain relief and landcover types using different resolution stereo and orthoimages with good results. Recently, tests have been performed using ADS40, IKONOS and Quickbird data. This paper reports on the performance comparison of the ATOMI system using different sensor data in two varying test sites. Visual analysis and quantitative measures of accuracy, correctness and completeness are presented, with typical completeness and correctness values of over 90% and planimetric accuracy of 0.4 m to 1 m. The advantages and disadvantages using different sensor data for road network updating are also discussed.
1. INTRODUCTION
In modern map production, a shift has taken place from maps stored in analogue form on paper or film to a digital database containing topographic information. Recently, National Mapping Agencies, especially in Europe, wish to generate digital landscape/topographic models that conform to reality and do not include map generation effects. In addition, various existing and emerging applications require up-to-date, accurate and sufficiently attributed digital data, especially of roads and buildings. To cope with higher product demands, increase the productivity and cut cost and time requirements, automation tools in the production should be employed. As aerial images are a major source of primary data, it is obvious that automated aerial image analysis can lead to significant benefits. In addition, the development of new digital aerial sensors and high-resolution satellite (HRS) sensors signifies a revolutionary change in image acquisition and the possibility of fully digital processing from image acquisition to the generation of value-added products for various applications. At ETH Zurich, in cooperation with the Swiss Federal Office of Topography (swisstopo), we have developed a practical system for the automatic extraction of 3D road networks from imagery that integrates processing of colour images and existing digital spatial databases, within the project ATOMI (Baltsavias and Zhang, 2003; Zhang, 2003b). This paper reports on the performance of the ATOMI system using extensive areas with varying relief and landcover and images from different sensors.
2. BRIEF DESCRIPTION OF PROJECT ATOMI
2.1 Aims of ATOMI
The aim of ATOMI is to update roads digitised from 1:25,000 scale maps by fitting them to the real landscape, improve their planimetric accuracy to 1 m and derive road centerline heights with an accuracy of 1 to 2 m. The topology and the attributes of the existing datasets should be maintained. This update should be achieved by using the image analysis techniques developed at the Institute of Geodesy and Photogrammetry (IGP), ETH Zurich. The whole procedure should be implemented as a standalone software package, should be operational, fast, and most importantly reliable. We do not aim at full automation (ca. 80% completeness is a plausible target), but the “correct” results should be really correct to avoid checking manually the whole dataset. More details of ATOMI can be found in Eidenbenz et al. (2000). The standard input data includes 1:16,000 scale colour imagery, with 30 cm focal length, and 60%/20% forward/side overlap, scanned with 14 microns at a Zeiss SCAI, a nationwide DTM (DHM25) with 25 m grid spacing and accuracy of 1-3/5-8 m in lowlands/Alps, the vectorised map data (VEC25) of 1:25,000 scale. The VEC25 data have a RMS error of ca. 5-7.5 m and a maximum error of ca. 12.5 m, including generalisation effects. They are topologically correct, but due to their partly automated extraction from maps, some errors exist.
2.2 The Road Reconstruction System
The developed system makes full use of available information about the scene and contains a set of image analysis tools. The management of different information and the selection of image analysis tools are controlled by a knowledge-based system. We refer to Zhang (2003a) for more details. The system can extract roads with a minimum width of ca. 3 pixels. It focuses on extraction of roads in open rural areas. The system has been modified to work also with orthoimages, whereby the 3D information is extracted by overlaying the 2D information on the DSM or DTM. Our system includes tools for external evaluation of the extracted results, by comparing the extracted results with precise reference data. The quality measures aim at assessing completeness and correctness as well as geometric accuracy. Completeness measures the percentage of the reference data that lies within the buffer of the extracted roads, while correctness is the percentage of the extracted roads within the buffer of the reference data. The buffer distance is defined using the required accuracy of the project ATOMI, i.e. 1 m. The geometric accuracy is assessed by the mean and RMS of the distances between the extracted roads and the reference data. The detailed description for the computation of the external evaluation measures is presented in Zhang (2003a). The developed system has been implemented as a stand-alone package initially on SGI platforms for stereo and orthoimages and has been ported to Windows XP only for orthoimage processing, with the same user interface. The system imports imagery, the existing road database and height data, and outputs the extracted road network as well as the computed road attributes including length and width in 3D Arc/Info Shapefile format that is readily imported into existing GIS software. The Windows XP version for orthoimages is termed ATOMIRO (with R standing for roads and O for orthoimages). All current and further improvements of the system and the tests reported here refer to ATOMIRO, while the SGI versions have been frozen.
3. TEST SITES AND DATA DESCRIPTION
Results from two test sites in Switzerland will be presented here, one in Thun and the other one close to the city of Geneva. The selection is mainly based on the consideration (1) the test sites should cover as many types of typical landcover in Switzerland as possible, and (2) the availability of images from multiple sensors. Both sites are in open rural areas but with different landcover. All road types in Switzerland can be found in the areas. The description of the test sites and the available imagery are listed in Table 1. Fig. 1 shows aerial images of the two test sites. Much larger and different regions have been used for tests by swisstopo with a total road length of about 9,000 km.
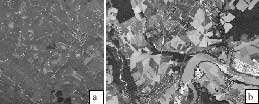
Figure 1. Overview of test sites: (a) Thun, (b) Geneva.
In Thun, the orthoimages were produced by swisstopo from aerial images of scale 1:16,000 using the DHM25. The 50-cm orthoimage is part of the nationwide dataset Swissimage with a planimetric accuracy of about 1 m. The images for 20 cm and 60 cm were taken in spring 2003 and for 50 cm in summer 1998. An orthoimage created from ADS40 summer images using the DHM25 is also available. Due to weaknesses in the control point distribution and the bundle adjustment of the ADS40 images, a discrepancy between the ADS40 orthoimage and the 20-cm orthoimage has been observed. A non-exhaustive comparison with manually selected feature points shows that the discrepancy varies between 0 and 80 cm. However, smaller differences also exist between the 1998 and 2003 aerial film orthoimages, caused by errors in the sensor orientation. Thus, the real accuracy of road extraction in image space is higher than the accuracy values derived from comparison between datasets (incl. the reference data), which have varying orientation errors. The Geneva test site (Fig. 1b) is near the city of Geneva, containing several larger villages, forest and a river. Another difference to the Thun site is that the scene contains grasslands and large fields of bare soil. In addition, many road-like lines are observed in the fields. The aerial orthoimage came from the Swissimage dataset. IKONOS and Quickbird images were also acquired in May 2001 and July 2003 respectively. The pansharpened (PSM) orthoimages of IKONOS and Quickbird were produced by software developed at IGP using a 2- m grid laser DTM with 0.5-m accuracy and had a planimetric accuracy of 0.5-0.8 m. The reference data for the Thun and Geneva test sites were measured manually, by swisstopo in 20- cm pixel size aerial orthoimages and by ETH Zurich in the Swissimage orthoimages, respectively. The tests were performed on a DELL PC with Pentium 4, 1.8GHz CPU and 1GB RAM running Windows XP.
4. RESULTS AND DISCUSSION
4.1 Thun Site
Completeness and correctness is sufficient for all images in the Thun site, with slightly inferior results for the 50-cm and 60-cm pixel size orthoimages. Although the pixel size of the ADS40 image is slightly more than the 20 cm of the aerial film orthoimage, the results achieved are almost identical. Typical results of road reconstruction and junction generation are presented in Fig. 2. In the figure, the first row shows the results of the scene with well defined roads, while the results of the scene with small settlements are presented in the second row. The VEC25 and the extracted roads are shown as white and black lines respectively. In each row, the orthoimages with pixel size 20 cm, 50 cm and 60 cm and the 30-cm pixel size ADS40 orthoimage are shown from left to right. The examples show that roads are generally correctly extracted from all images. Road junctions are also well formed. This observation is confirmed by the external evaluation of the extraction results using the reference data (see Table 2). To account for the discrepancy between the ADS40 and aerial film orthoimages, the buffer distance was set to 2 m, when assessing the results from the ADS40 orthoimage.

Figure 2. Typical results in Thun site. See text for explanation.
Our system delivers the best results with the 20-cm orthoimage. About 95% of the roads are correctly extracted with an accuracy of about 50 cm. The non-extracted or falsely extracted roads are mainly in small villages. Taking into account the discrepancy between the ADS40 and the 20-cm film orthoimage (as indicated by the large mean values), our system performed equally well on ADS40 data. Indeed, visual check over the whole test site shows that the results from ADS40 data are actually at the road centres.
Table 2 also shows that all quality measures are gradually deteriorating with decreasing pixel size. One cause for less completeness is that paths in fields are only partially extracted because the path surface is blurred and road edges are very weak. However, the quality deterioration is much less than the pixel size reduction. E.g. for 60-cm vs. 20-cm pixel size, in the first case we have 9 times less data, but completeness, correctness and accuracy deteriorate only by 7.5%, 4.5% and 40%. On the other hand, this slight quality decrease may still mean expensive additional manual editing, so the question of pixel size choice should be carefully considered. Table 2 shows that the processing speed of our system is high (e.g. ca. 30 minutes for more than 40-km roads in 20-cm pixel size images), and that processing time decreases almost 1:1 with orthoimage pixel size. Extensive tests at swisstopo with 50-cm orthoimages show that roads in an average road density 1:25,000 map sheet covering 210 km 2 can be extracted in 3-4 hours on a Dell PC with Pentium 4, 2GHz CPU and 2GB RAM running Windows XP.
4.2 Geneva Site
Our system achieves good results with the 50-cm orthoimage (Swissimage), similar to the ones in Thun (see Table 3). However, the performance (mainly the completeness) with the HRS data is poor, especially the 1-m IKONOS image. In this image, higher-class roads are usually extracted, while most narrow roads are not, because the system prerequisite of 3 pixel wide roads is not fulfilled. The increased ground resolution in Quickbird makes more roads visible than in IKONOS, and also the road surface and road edges are clearer, resulting in a better performance. However, compared with the 60-cm aerial film orthoimage in Thun, the completeness is still rather low.
It is apparent that the definition quality of an object does not depend only on the pixel size but other image quality factors too. Critical factors influencing image quality, like atmospheric and illumination conditions, sensor and sun elevation and image sharpness are much less or not controllable with spaceborne sensors compared to airborne ones, resulting thus in inferior image quality and object definition with the former, even if the ground pixel size is similar. Both HRS images lead to accuracy (RMS) of less than 1m. The mean values are high, due to a systematic bias caused by probable errors in the transformation from the coordinate system of Canton Geneva to the Swiss coordinate system. Fig. 3 shows several examples of extracted roads and road junctions from the Swissimage, IKONOS and Quickbird orthoimages. In the Geneva test site, no extraction is applied to the roads inside the villages since the sizes of the villages are large and are classified as urban area. The non-extracted roads are usually those in fields with very weak edges. False extraction in Swissimage occurs when a road in fields is neighbouring with road-like lines.

Figure 3. Three examples of extraction results in Geneva site. The black lines are the results and the white lines are the VEC25 roads. In each example, the Swissimage, IKONOS and Quickbird orthoimages are shown from left to right.
Fig. 4 presents two examples (3 images for each) to show the limitation when our system is applied to HRS data. In the figure, the VEC25 roads and extracted results are presented as white and black lines respectively, while the Swissimage, IKONOS and Quickbird orthoimages are shown from left to right. In both examples, the roads are extracted from Swissimage. The road shown in the first scene (left three images) is not extracted in the IKONOS image, while the road in the second scene (right three images) can not be extracted in the HRS data due to haze. We also observed that clouds appeared in HRS imagery prohibit road extraction.

Figure 4. Examples showing limitations of our system on HRS data. See text for explanation.
5. CONCLUSIONS
In this paper, we have reported the performance comparison of the ATOMI road reconstruction system between aerial film orthoimages of varying pixel size, ADS40 and HRS orthoimages over two test sites in Switzerland, using accuracy, completeness and correctness quantitative measures and visual control. It is shown that about 95% of roads in rural areas are correctly extracted using aerial film and ADS40 orthoimages with 20-cm and 30-cm pixel size, respectively. With increasing pixel size, the system performance deteriorates but to a much less degree. However, even though the landcover of the two test sites is largely different, our system achieved in both ca. 90% completeness with 50cm aerial orthoimages. Thus, the general conclusion is that the ATOMI system can reconstruct road networks in rural areas using aerial orthoimages with maximum pixel size of ca. 50-60 cm with completeness and correctness of 90%-95% and an accuracy of 0.4-0.7 m. The speed is sufficient for operational production. The test shows that the system performance is poor with the HRS data, especially for 1-m IKONOS PSM imagery. Both HRS can deliver submeter accuracy, however the problem lies with the poor object definition and image quality. Only half of the roads in the test sites are reconstructed, mainly higher-class roads with larger width. The surface of the narrow roads is usually blurred and the road edges are weak and not clear in the HRS images, thus most of the narrow roads are not extracted. The test results show that the performance on the 70-cm Quickbird data is considerably better than that on the 1-m IKONOS data, but still of lower completeness than the 60-cm pixel size aerial orthoimage. Generation of Quickbird orthoimages with 60 cm, or deployment of new HRS with 40 cm - 50 cm ground pixel size may pave the way for application of the current approach with good completeness even for such imagery, if the imaging conditions are favourable.
ACKNOWLEDGEMENTS
We acknowledge the financial support and the data provided for this work and the project ATOMI by the Swiss Federal Office of Topography and the NPOC, Bern.
REFERENCES
- Baltsavias, E., Zhang, C., 2003. Automated updating of road databases from aerial imagery. Proc. Workshop "Data quality in Earth Observation Techniques", ITC, Enschede, The Netherlands, 21 November.
- Eidenbenz, Ch., Kaeser, Ch., Baltsavias, E.P., 2000. ATOMI – Automated Reconstruction of Topographic Objects from Aerial Images using Vectorized Map Information. International Archives of Photogrammetry, Remote Sensing and SIS, Vol. 33, Part B3/1, pp. 462-471.
- Zhang, C., 2003a. Updating of cartographic road database by image analysis. Ph.D. Thesis, Institute of Geodesy and Photogrammetry, ETH Zurich, Switzerland, Report No. 79.
- Zhang, C., 2003b. Towards an operational system for automated updating of road databases by integration of imagery and geodata. ISPRS Journal of Photogrammetry and Remote Sensing 58(3-4), 166-186.