| GISdevelopment.net ---> AARS ---> ACRS 2004 ---> Data Processing: Data Fusion |
Integration of Street
Networks and LIDAR for Modelling and Visualisation of Terrain Data
Martin Kada, Norbert Haala,
Stephanie Maier, Dieter Fritsch
Institute for Photogrammetry (ifp)
University of Stuttgart, Germany
Geschwister-Scholl-Strasse 24D, D-70174 Stuttgart
E-mail: firstname.lastname@ifp.uni-stuttgart.de
Institute for Photogrammetry (ifp)
University of Stuttgart, Germany
Geschwister-Scholl-Strasse 24D, D-70174 Stuttgart
E-mail: firstname.lastname@ifp.uni-stuttgart.de
ABSTRACT
The generation of realistic 3D landscape visualisations is already feasible, if data from airborne laser scanning, which allows for a dense and accurate acquisition of the terrain surface, is com-bined with additional textures from aerial images. While this is true for open areas, the presenta-tion of more complex areas like urban landscapes requires additional processing of this original data. As an example, during the visualisation of buildings from close virtual viewpoints, even small geometric errors which can result from a non-planar triangulation of a building façade may heavily disturb the degree of realism. Another problem is street surfaces, where the laser-based point measurement is disturbed by objects like vehicles, traffic signs or trees. These erro-neous points have to be eliminated by suitable filter algorithms, otherwise they will result in disturbing height discontinuities in the street surface to be visualised. Within the approach pre-sented in the paper, the required filter process is supported by the integration of existing street networks. By these means a smoothed 3D shape of the longitudinal axis of the streets can be estimated and expanded to the complete street region. In addition to demonstrating the DEM filter process in street regions, the paper discusses its application to continuous level of detail approaches which are commonly used in the real-time visualisation of such terrain models.
1. INTRODUCTION
Over the past years, applications based on the real-time visualisation of 3D urban landscapes have spread considerably. Interactive virtual presentations of urban environments are used in fields like tourism, architecture, city planning and marketing, or car navigation and location based services. Frequently, the required data base is collected from airborne LIDAR. These sys-tems provide information on the geometry of objects by densely distributed and accurate 3D points. If they are combined with aerial cameras, object colour is additionally available. In prin-ciple, the resulting surface description can be directly used for visualisation purposes. One prob-lem is the huge amount of data; still this can be reduced efficiently by approaches based on the generation of multiple levels of details. (Heckbert and Garland, 1997) give a comprehensive overview on simplification algorithms that are applicable for such visualisation purposes. For vertical surfaces, the limited spatial resolution of the LIDAR points from airborne data col-lection, however, will frequently result in geometric errors due to interpolation effects. LIDAR points relating to building objects need therefore be eliminated and replaced by 3D building models. In addition, the processing of the airborne LIDAR data is also required to eliminate other surface points, which do not correspond to the terrain surface.
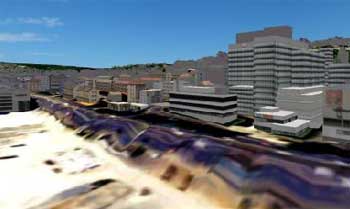
Figure 1. 3D landscape model of Stuttgart rendered in a real-time visualisation environment. The street in the front appears tilted and wavy because of the low resolution of the sub-sampled LIDAR data.
Frequently, the terrain surface is occluded by trees or other vegetation. Especially in urban areas small objects like pedestrians, vehicles or traffic signs additionally result in LIDAR points, which do not represent the required terrain surface. Thus, a number of filter algorithms have been developed, which are aiming on the extraction of the so-called bare-Earth surface from the originally measured LIDAR points. An overview on recent approaches as a discussion of the performance of the available filters is given in (Sithole and Vosselman, 2004). In summary, de-spite of the reported considerable success of these algorithms, an absolutely error free classifica-tion of these point clouds is not feasible, especially for difficult terrain like steep slopes and dis-continuities. This mainly results from the complexity of automatic data interpretation, the some-times low number of bare-Earth points and potential errors during point measurement.
Taking the aforementioned data processing, (Kada et al., 2003) show that literally a complete city can be interactively displayed in 3D on today’s consumer PC systems (see Figure 1). In order to improve rendering performance, speed-up techniques like continuous level of detail are used for the terrain model whereas image based rendering techniques and generalisation is ap-plied for the 3D building models. Especially for terrain visualisation, a multitude of algorithms are available based on the triangle bintree (Lindstrom et al., 1996), quad-tree structured triangu-lation (Roettger et al., 1998) or the progressive meshes (Hoppe 1998). All these algorithms have in common that their underlying data structure is a sub-sampled, regular grid of height values that are triangulated for rendering. Unfortunately, this simplification will destroy the features of important objects. For example, streets are unlikely to maintain their horizontal position and become tilted and wavy (see Figure 1).
One option to improve this simplification is the use of additional information. The work pre-sented in this paper is especially focussed on the filtering of LIDAR data in street regions. Within these regions LIDAR points measured on vehicles or traffic signs will lead to height dis-continuities and bumps in the interpolated surface, which will considerably disturb the visual impression. For this object type, a priori information on street networks is frequently available and thus can be integrated to data processing (Kreimeike, 2004). The enhancement of street ob-jects is another topic addressed in order to improve the visual perceptibility of street data.
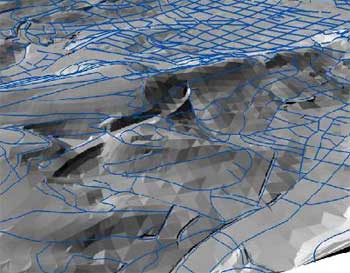
Figure 2. DTM overlaid with the ATKIS street network.
2. DATA SOURCES
2.1 ATKIS
Especially the wide spread of car navigation applications has lead to a growing availability of road data in different formats. One example is the Geographic Data File (GDF), which is a European standard that is used to describe road networks and related data especially for car navigation purposes. Similar information is available from the so-called ATKIS-DLM. ATKIS (Authoritative Topographic Cartographic Information System) has been developed by survey offices of the federal states of Germany (AdV, 1998). It is structured into seven functional classes like e.g. settlement, vegetation and traffic. Each functional class is again subdivided into object groups. Concerning traffic, its object groups are road traffic, railway traffic, air traffic, etc. An object group includes several object types. Object types specify the geometrical repre-sentation and the attributes of real world objects. In case of road traffic, available object types are for example roads, squares or footpaths. Both formats are acquired in an approximate scale of 1:25.000 with a positional accuracy below three meters. The street regions are defined by street axis and width as attributes.
2.2 DTM and LIDAR
The Digital Terrain Model (DTM) used in our research was already available from terrestrial and photogrammetric measurement. With a ground resolution of approximately 10m the DTM is rather coarse with the exception of some isolated spots that have been manually captured at a higher resolution. As the resolution is generally good enough for a real-time visualisation of large-scale landscapes, the streets are not visible in the geometry itself. If an aerial or satellite image is superposed, the roads look tilted especially around hills. Figure 2 shows the DTM with overlaid ATKIS street network data. The LIDAR data set is from the state of Baden-Württemberg and is pre-processed with a morphological operator as described in (Schleyer, 2001). Small objects like buildings and trees were eliminated approximately. The point distance of the data is around 1.5m.
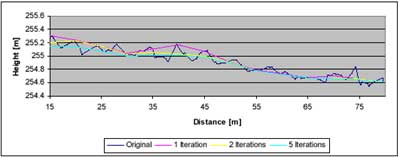
Figure 3. Original and filtered longitudinal street axis.
3. FILTERING OF STREETS
The street data found in ATKIS is initially a 2D network of longitudinal street axes. By combin- ing these lineal objects with the LIDAR height values, the result is a 3D polyline. Depending on the resolution of the LIDAR data, a large number of line segments are created in the process. In order to reduce the number of line points and at the same time smooth the height profile, the polyline is filtered by a line estimation approach which bears resemblance to the algorithm of (Briese and Pfeifer, 2001). The assumption is an unsymmetrical error distribution, meaning that points that lie above an approximated line are presumed to be erroneous due to points measured on cars or other obstacles. These points are given a small weight in an iterative estimation proc- ess.
Our algorithm works by creating a new polyline for each street with small line segments to pre- serve the original street characteristics. Whereas the horizontal positions are taken from the given polyline, the height values are newly computed. For this purpose, the heights of all line points within a given horizontal distance are taken into a least squares adjustment to approxi- mate a straight line. The functional model of the line is a piecewise approximation by a simple linear polynomial of the form
hi = ali + b
where a and b are the unknown line parameters, li the distance between consecutive line points and hi the observed height values. Initially, the observations are equally weighed, but the impact of points that lie above the resulting line is then lowered for the next iteration. In this way, the recomputed line moves towards the lower points. The iteration stops when the line does not change significantly. The height of the point can be computed so that it lies on the resulting straight line. See Figure 3 for an example where a street segment is filtered with a maximum of 5 iterations.
The next step is the broadening of the streets from the longitudinal axes to the actual street width, which is an attribute that is stored in the ATKIS dataset. For this purpose, both roadsides are created by computing new points that are half the street width from the middle axes. Before these points are inserted into the DTM, the points that lie in the same area are identified by a buffer operation and subsequently removed. Another application is the replacement of street points in the LIDAR data set with the smoothened street regions in order to filter the roughness of the data points.
4. GENERALISATION
The process of generalisation is to simplify the three-dimensional information, but at the same time emphasize important objects in order to guarantee their perceptibility. Depending on the application, buildings and the street network are usually most significant in the context of 3D city models. In real-time visualisation of 3D urban landscapes, simplification is an important technique to speed up the rendering process. This comes from the fact that even modern 3D hardware is still not able to render highly dense data sets like laser scanning data in full resolu-tion for large areas. Rather, the data is sub-sampled to a lower resolution and rendered in a con-tinuous level of detail approach. Street regions can easily disappear in the process. In order to improve the visual appearance, the street objects are enhanced in our approach by using an over-sized street width in the filtering process. The filtered data is then be integrated either in the DTM or back into the original LIDAR data set.
5. CONCLUSION AND FUTURE WORK
This article described the concept of a filter algorithm for smoothing airborne laser scanning point clouds by using additional data sources like street network data that is commonly found in geographic information systems like ATKIS. It has been shown that streets that have been fil-tered by an iterative least-squares adjustment process appear less bumpy. Through enhancement of the street width, the perceptibility of streets can be improved for simplified or generalized terrain models (see Figure 4).
The work presented in this article is still ongoing. Even though the smoothing of streets and roads improved the visual impression and the enhancement of the street width results in a better perceptibility, the resulting DTM or LIDAR data is not well suited to continuous level of detail approaches. These speed-up techniques rely on regular height grids as the data basis which is then rendered as triangles. So our future work is to apply the smoothed middle axes of the streets directly to such a triangular data structure. Also, new displacement operators are to be investigated to counteract deformation problems that may occur.
Figure 4a. Original DTM of Stuttgart.

Figure 4b. DTM with integrated, fil-tered street network.

Figure 4c. LIDAR data of Stuttgart.

Figure 4d. LIDAR with filtered streets and enhanced street width.
6. ACKNOWLEDGEMENTS
The research described in this paper is founded by „Deutsche Forschungsgemeinschaft“ (DFG – German Research Foundation). The research takes place within the Centre of Excellence No. 627 “NEXUS – SPATIAL WORLD MODELS FOR MOBILE CONTEXT-AWARE APPLICATIONS” at Uni-versity of Stuttgart.
7. REFERENCES
- AdV, 1998. Amtliches Topographisch-Kartographisches Informationssystem (ATKIS). Technischer Bericht, Arbeitsgemeinschaft der Vermessungsverwaltung der Länder der Bundesrepublik Deutschland.
- Briese, C. and Pfeifer, N., 2001. Airborne Laser Scanning and Derivation of Digital Terrain Models. In: Gruen, A., Kahmen, H. (Eds.), Optical 3D Measurement Techniques V. Technical University, Vienna, Austria, pp. 80-87.
- Heckbert, P. and Garland, M., 1997. Survey of Polygonal Surface Simplification Algorithms. In: Multiresolution Surface Modelling Course, SIGGRAPH ’97.
- Hoppe, H., 1998. Smooth View-Dependent Level-of-Detail Control and its Application to Ter-rain Rendering. In: IEEE Visualization 1998, pp. 35-42.
- Kada, M., Roettger, S., Weiss, K., Ertl, T. and Fritsch, D., 2004. Real-Time Visualisation of Urban Landscapes using Open-Source Software. In: Proceedings of the ACRS 2004 ISRS, 24 th Asian Conference on Remote Sensing & 2003 International Symposium on Remote Sensing, Busan, Korea.
- Kreimeike, K., 2004. Generalization of Dense Digital Terrain Models while Enhancing Impor-tant Objects. In: International Archives of Photogrammetry and Remote Sensing Vol. XXXV, Part B, Istanbul, Turkey.
- Lindstrom, P., Koller, D., Ribarsky, W., Hodges, L. F., Faust, N. and Turner, G. A., 1996. Real-Time, Continuous Level of Detail Rendering of Height fields. In: Proceedings SIGGRAPH ‘96, pp. 109-118.
- Roettger, S., Heidrich, W., Slusallek, Ph. And Seidel, H.-P., 1998. Real-Time Generation of Continuous Levels of Detail for Height Fields. In: Proc. WSCG ’98, pp.315-322.
- Schleyer, A., 2001. Das Laserscan-DGM von Baden Württemberg. In: Photogrammetric Week ’01, Wichmann Verlag, Heidelberg, pp. 217-225.
- Sithole, G. and Vosselman, G., 2004. Experimental Comparison of Filter Algorithms for Bare-Earth Extraction from Airborne Laser Point Clouds. ISPRS Journal of Photogrammetry and Remote Sensing 59 (1-2), pp. 85-101.