| GISdevelopment.net ---> AARS ---> ACRS 2004 ---> New Generation Sensors and Applications: New Generation Sensors |
ROCSAT-2 Programming
Management and Sheduling
Fengtai Hwang* & Hongyu
Chen**
*Assistance Researcher, National Space Program Office (NSPO), Hsinchu, Taiwan
E-mail: se10@nspo.org.tw
** Manager, Tatung System Technologies Inc., Taipei, Taiwan
E-mail: hongyu.chen@etatung.com.tw
*Assistance Researcher, National Space Program Office (NSPO), Hsinchu, Taiwan
E-mail: se10@nspo.org.tw
** Manager, Tatung System Technologies Inc., Taipei, Taiwan
E-mail: hongyu.chen@etatung.com.tw
ABSTRACT:
ROCSAT-2, the first remote sensing satellite owned and operated by Taiwan, was successfully launched on May 20, 2004. Unlike LANDSAT, repeated orbit enables ROCSAT-2 remote sensing capability to acquire any of covered area everyday. Under various constraints of her agility, imaging capability and multi-requirements from image tasking order, a tool which may facilitate mission planning is a key element for ROCSAT-2 operators to successfully execute ordered imaging tasks. Such a need drives NSPO and Tatung System Technologies Inc. to develop Programming Management System (PMS) in the Image Processing Center (IPC) to assist both mission programmer and operator’s daily operation. PMS serves as a decision supporting tool to assist ROCSAT-2 imaging acquisition plans in the following two ways: quick task scheduling and image evaluation capability.
In this paper, ROCSAT-2 daily imaging mission flow chart from receiving tasking order to satellite command load uplink is described. Detailed functions and operation procedures for PMS are demonstrated along with a mathematical model for proposed optimal scheduling process.
1. INTRODUCTION
ROCSAT-2 was successfully launched on May 20, 2004. Unlike LANDSAT, repeated orbit enables ROCSAT-2 remote sensing capability of acquiring any of covered area everyday. Under the constraints of her agility, imaging capability and multi-requirements from image tasking order, a tool which facilitates mission planning is a key element for ROCSAT-2 operators to successfully execute ordered imaging tasks.
The Image Processing Center (IPC) is a ground segment of ROCSAT-2 for satellite image processing. In IPC, there are two systems related to image tasking: Programming Management System (PMS) and Planning & Scheduling System (PSS).
The clients who need ROCSAT-2 images can submit tasking orders directly by Web Service System (WSS) or send a request to IPC through fax, e-mail or even by telephone. The operator submits the client’s tasking order by Programming & Production Interface (PPI). Both WSS and PPI are computer programs to take care of submitted tasking order. WSS is a web-based program whose target users are those who needs only simple tasking order for ROCSAT-2 image. PPI is designed for an operator in IPC who handles complex and site survey tasking order form special clients.

Figure1. Flow chart of ROCSAT-2 remote sensing mission
PMS, a decision supporting system, assists operator to generate ROCSAT-2 daily imaging acquisition plans. First, PMS quick task scheduling capability allows operator to formulate and check feasibility of imaging plans and acquires optimal one from those plans. Meanwhile, PMS calls PSS to calculate desired satellite attitude based on imaging time and target area under the constraints of ROCSAT-2 maneuver, agility and SSR memory. Second, such a capability also allows operator to evaluate received image and rapidly issues a new task for the same area if the image was not acceptable due to its quality or weather condition.
Both PMS and PSS focus on solving the problem caused by confliction among tasking orders the other satellite resource constraints are checked by Mission Planning Scheduling System (MPSS). MPSS deals not only with ROCSAT-2 remote sensing mission but also scientific mission. MPSS generates a sequence of commands to satellite through TT&C. The flow chart of ROCSAT-2 remote sensing mission is shown in Figure 1. Note that MPSS is not part of IPS but a subsystem of Mission Operation Center (MOC).
2. PROGRAMMING MANAGEMENT
2.1 Tasking Order
A tasking order is a new image request from client. Unlike SPOT satellite, RCOSAT-2 image is segment based one. A segment corresponds to a SSR file defined as the minimum continuous portion of satellite telemetry in which the viewing characteristics are constant. These characteristics are mono-instrument and mono-image mode.
For ROCSAT-2, there are three type of tasking orders:
- Simple tasking order: One image is requested during a period of time and area of interested for the target can be fulfilled by one single segment.
- Complex tasking order: One image is requested during a period of time, and area of interested for the target can not be fulfilled by one single segment.
- Site survey tasking order: During a period of time, one image is requested for one specific day or up to several day and the area of interested for the target can be fulfilled by on signal segment. Clearly, PMS provides the capability to support the operator for all kinds of tasking order.
The user interface of PMS is shown as below:
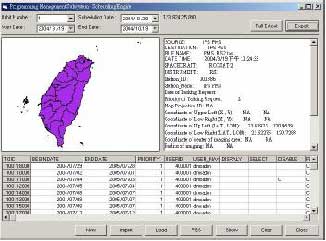
Figure2. PMS user interface
Operators can specify orbit number, scheduling date, time duration (starting date and end date) for inquiries about tasking order in the database. There are three sub-panels in the main panel of PMS: tasking order listing, map and tasking order information. The tasking order listing sub-panel displays the result of tasking order query; the map sub-panel provides a user friendly display for AOI (area of interested) of tasking order; the tasking order information sub-panel shows the detail information about the selected tasking order.
From the main panel, operator can create a new tasking order, import tasking order (based on specified query criterion) from database, and load an existed tasking order, initial scheduling engine, display/clear the scheduling result and close the system.
2.3 Operation Concept
1. Tasking Order Import and Select
Operators input the target orbit number, time limit and resolution. System can load tasking orders, which fulfills the query criterion, from database and displays them on the panel. The operator can click to select the tasking order form map display panel or tasking order list panel where detail information of this tasking order may be found.
2. Daily Scheduling Activities
Operators then select specified date for tasking according to the query result of tasking order. When operator confirms the selected tasking order for the daily scheduling, PMS system will based on these selected tasking order to generated the related tasking request. It also enables PSS to generate the mission time line for ROCSAT-2 and display the result of the mission planning which supports operator to make final decisions. There is only one mission time line for each orbit and operator can re-generate a new mission time line to replace the existed one. After all 14 orbits image acquisition scheduling, system will conclude all mission timeline report and generate a completed mission timeline report for the scheduling date. Completed result will be sent to MCC for further confirmation.
3. Evaluate received image
As the new image is received, the quick-look scene of the received image segment can be shown on the mail panel. Operator can evaluate the received image and decides to accept (totally or partially) it then close the related tasking request or reject it if the image quality does not meet the requirement.
3. SCHEDULING SYSTEM
The main function of PSS is to generate a mission time report (MTR) according to daily tasking orders for each orbit. These reports will be combined and deliver affirmative one to MOC for later on satellite commands generation after an operator completes all 14 orbits acquisition imaging scheduling.
MTR includes (NSPO, 2003): (1) The beginning time and duration of satellite maneuvering, (2) The attitude of satellite maneuvering, (3) The beginning time and duration of satellite imaging, (4) The beginning time of satellite “GO HOME”, and other information, such as the imaging mode (PAN, MS or PAN+MS). Therefore, PSS have to calculate the starting time for imaging and its corresponding satellite maneuvering attitude for each taking order.
3.1 Mathematical Model
For each orbit, given a set of locations of tasking orders, PSS computes the starting imaging time and satellite maneuvering attitude for each tasking order so that the sum of distances square between tasking area and satellite is minimum. It is a difficult problem since both starting imaging time and maneuvering attitude are coupled through image durations, maneuvering durations, and locations of tasking orders.
To simplify this problem, image duration which depends on the length of taking area along satellite ground track is given for each tasking order, and maneuvering duration is assumed to be a constant which decouples the connection between starting imaging times and maneuvering attitudes. Next, starting imaging times are computed first and followed by maneuvering attitudes.
A mathematical model (Hwang, 2004) for PSS may be described by:
is minimum. Based on this model, an exhaustive search method is used to find the best starting image time sequence.
3.2 Example
Figure3 demonstrates an example of PSS scheduling result on Map Tool Kit (MTK), a satellite scheduling visualization tool developed by NSPO. Three tasking areas, Taipei, Kaohsung, and Dongsha Island are scheduled. Starting imaging times, image durations and their corresponding maneuvering attitudes for these three taking orders are listed on the top of MTK. Satellite ground track and image coverage are also shown on MTK.
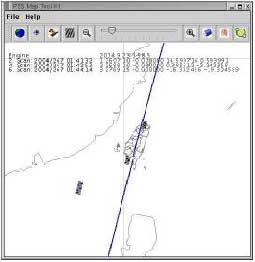
Figure3. PSS scheduling result on MAP Tool Kit
4. SUMMARY
This paper reveals a big picture how to deal with multiple tasking inquires of ROCSAT-2 images, from user-end down to operator. It demonstrates the feasibility of employing the most up-to-date technology for the programming management and a mathematical model with an algorithm used in daily ROCSAT-2 scheduling job. With both quick task scheduling and image evaluation capabilities, PMS/PSS will play a key decision-supporting roll to assist NSPO mission programmer and operator to perform daily image acquisition plan with great efficiency during ROCSAT-2 business operations.
REFERENCE
- Hwang, Feng-Tai, 2004. ROCSAT-2 Satellite Scheduling Optimization Problem. NSPO Internal Technical Report.
- NSPO, 2003 Image Processing System-System Interface Control Document, NSPO, IPS-ICD-001.